







三维柔性焊接平台结构特点和设计要求
三维柔性焊接平台结构特点和设计要求:
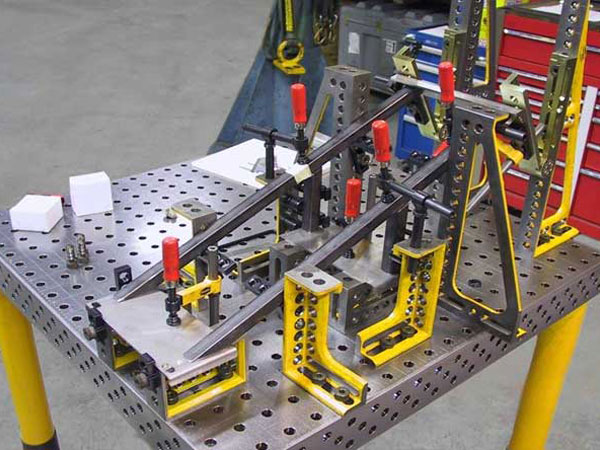
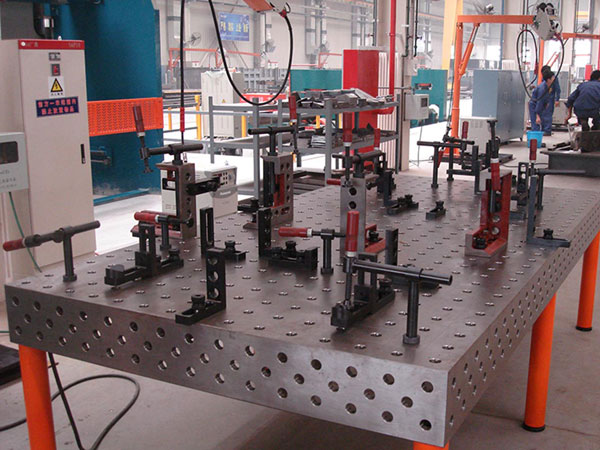
三维柔性焊接平台其实是一套预先制作好了的标准化系统化通用化的模块,所有模块的连接固定和压紧都是以孔定位加上锁销的方式出,模块与模块之间可以根据工件的尺寸变化而调整,整个一套夹具的组合可以实三维空间的结合,这套夹具的特点:主要用在焊接产品上 为理想,所以叫三维柔性组合焊接工装夹具。这套工装分为两大类:一是28系列,即孔径¢28,表面分布着100100的网格线;二是16系列,即孔径¢16,表面分布着5050的网格线。
三维柔性焊接平台柔性工装虽然是一种柔性可重复利用的工装,但其本质决定了 有足够的结构强度和结构刚度来保证其定位准确度;同时,柔性工装要实现其柔性功能,使得其结构较一般刚性工装复杂。因此,针对柔性工装特点的结构优化设计技术是柔性工装设计的一项重要技术。
三维焊接平台柔性工装的结构优化设计技术主要包括:工装结构(特别是骨架结构)轻量化设计优化以及静刚度变形分析,针对工装应用工况的结构模态分析,柔性工装的柔性功能特性对其结构的影响分析,模块化单元的结构设计等。
三维焊接平台柔性工装的自动重构主要依靠控制技术,由于工装的机械结构相对复杂,为适应工装的结构,柔性工装数控系统在满足通用CNC数控系统功能基础上,又具有自己的特点。
(1)柔性工装控制系统要具备控制大量执行元件的能力,特别是需要具备 控制超多(多于6)轴的能力。同时要求工装控制系统具有开放性,伺服轴(电机)数量增减方便,而且数量增减不影响控制精度。
(2)柔性工装控制系统通过控制伺服电机实现柔性工装中大量定位点的运动控制,柔性工装的功用决定了在应用中一般只关心其各定位点终的位置精度,而不关心运动轨迹精度,因此,柔性工装数控系统一般不需具备多轴同步和插补功能。
(3)为适应工装设备一体化的发展趋势,柔性工装控制系统要能适应多种总线拓扑结构,以便能与其他数控设备的数控系统集成。
对于三维焊接平台夹具设计它是有 的基本要求的。(1)、工装夹具应具备足够的强度和刚度。夹具在生产中投入使用时要承受多种力度的作用,所以工装夹具应具备足够的强度和刚度。(2)、夹紧的可靠性。夹紧时不能破坏工件的定位位置和保证产品形状、尺寸符合图样要求。既不能允许工件松动滑移,又不使工件的拘束度过大而产生较大的拘束应力。(3)、焊接操作的灵活性。使用夹具生产应保证足够的装焊空间,使操作人员有良好的视野和操作环境,使焊接生产的全过程处于稳定的工作状态。(4)、便于焊件的装卸操作时应考虑制品在装配定位焊或焊接后能顺利的从夹具中取出,还要制品在翻转或吊运使不受损害。5)、良好的工艺性。所设计的夹具应便于制造、安装和操作,便于检验、维修和 换易损零件。设计时还要考虑车间现有的夹紧动力源、吊装能力及安装场地等因素,降低夹具制造成本。我公司生产铸铁平台

